
Necessites ajuda?
Posa't en contacte amb nosaltres

Necessites ajuda?
Posa't en contacte amb nosaltres
Gràcies per contactar
El teu formulari s'ha enviat correctament. El nostre equip es posarà de nou en contacte amb tu com més prompte millor.
Upppss...!! Ha ocorregut un error.
Intente l'enviament més tard o escriga un correu electrònic directament a areaempresas@ua.es

LA FITXA
COMPLETA
BAIXA
RESUM
EXECUTIU
DADES DE CONTACTE:
Relaciones con la Empresa
Oficina de Transferencia de Resultados de la Investigación-OTRI
Universidad de Alicante
Tel.: +34 96 590 99 59
Email: areaempresas@ua.es
http://innoua.ua.es
El grupo de investigación Informática industrial y redes de computadores del Departamento de Tecnología Informática y Computación de la Universidad de Alicante ha desarrollado una herramienta de prototipado de sistemas de inspección de superficies especulares.
El desarrollo de sistemas para inspección visual de superficies especulares es un problema no resuelto en cuanto a su aplicación general, ya que sólo existen algunos sistemas que pueden utilizarse en casos muy restringidos. La consecución de una herramienta para realizar prototipos de sistemas de inspección para superficies especulares tiene un gran impacto en todos los ámbitos: industrial, científico, socioeconómico, etc. Además de su carácter estratégico para los sectores tradicionales en los que es necesario innovación para poder resultar competitivos.
El impacto socioeconómico de la herramienta ofertada es inmediato si se consideran los elevados costes económicos, tanto en material como en personal y en tiempos, que conlleva la inspección de productos con superficie especular. El impacto industrial y la repercusión en sectores tradicionales como el juguete, el calzado y el textil, puede resultar crucial en cuanto a la reducción de costes y al aumento de la competitividad al dotarlas de sistemas de mejora de calidad en el producto.
En el aspecto científico y tecnológico, desarrollar herramientas para sistematizar las tareas de inspección resulta de gran avance, más si tenemos en cuenta la dificultad para tratar con superficies altamente reflectantes.
Se busca establecer un acuerdo de proyecto de I+D (cooperación técnica) para finalizar el desarrollo de la tecnología. Asimismo, se desea ofertar la herramienta H-ProSis a los sectores industriales correspondientes.
La herramienta de prototipado de sistemas de inspección se establece a partir de un modelo para inspección de superficies especulares. La concreción de este modelo toma como punto de partida el trabajo de investigación básica sobre la formación de la imagen que ya se ha realizado. En este trabajo se describe que en la formación de la imagen intervienen variables del entorno, del motivo (el producto) y del sistema de visión (ver Figura 1). Ciertas variables del entorno y del sistema de visión están relacionadas entre sí pudiendo definirse en un dominio de representación común (véase iluminación en el dominio del entorno, diafragma en el dominio del sistema y nivel de gris en el posible dominio de representación común).
La contribución de la cámara modula a la contribución del motivo por efecto de la atenuación no lineal que representa su curva de sensibilidad en función de los valores de las magnitudes. La contribución del entorno (luz ambiente, humedad, otros motivos, etc.) también modula a la contribución del motivo. En condiciones tipo o en aproximaciones sencillas de los problemas de visión, lo habitual es considerar que su efecto es despreciable porque la percepción tiene lugar en las proximidades de la sensibilidad de la cámara. Esa simplificación es claramente inaceptable cuando las condiciones del entorno están en los límites del rango de utilización de la cámara; como son las situaciones de deslumbramiento, planos muy alejados de la focal, reflejos de otros motivos, etc.
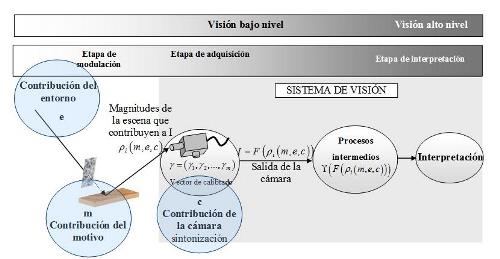
Figura 1. El proceso de percepción visual
En el caso de las superficies especulares los problemas de la visión entrañan mayor dificultad como consecuencia de las características de reflectancia de estas superficies, donde la modulación de las condiciones del entorno al motivo es más notable. Es decir dos motivos distintos pueden confundirse bajo distintas condiciones de entorno. Por tanto si consideramos que las condiciones de calibrado son las mismas para dos imágenes distintas tendremos dificultad, al menos porque puede confundirse a una cámara dada para que no pueda distinguir entre el entorno y el motivo. En este caso, la modulación espacial de la contribución del entorno crea en el
espectador la ilusión de los motivos de una escena (el propio espejo). Por otro lado, la iluminación del entorno puede provocar brillos en el motivo y confundir dos imágenes con distintas motivos.
El problema a resolver es el de determinar si un producto se desvía de las especificaciones de fabricación. Podremos decir que será determinar si un motivo (las variables que definen el motivo) se desvía de las magnitudes de las variables establecidas previamente en la fase de diseño. Es decir, un motivo estará definido por un conjunto de variables (la forma, el color, la reflectividad, la topografía del motivo, etc.). Cualquier desviación de las magnitudes establecidas en el objeto determinará otro motivo defectuoso. Según la variable o variables que se desvíen estaremos hablando de uno u otro tipo de defecto: morfológicos, cromáticos, topográficos, etc.
Por ejemplo, si la variable color que describe el objeto varía con respecto al establecido diremos que estamos ante un defecto cromático. El objetivo es plantear la solución en el nivel bajo de los sistemas de visión para poder trabajar con datos poco elaborados y algoritmia de menor coste computacional. Para ello, las condiciones en las que se realiza la inspección (condiciones de trabajo) deben estar lo más próximas posibles al punto de sintonización de la cámara, que es el punto donde la sensibilidad es máxima para unas determinadas variables que conforman el motivo (o el entorno o el calibrado).
A diferencia de las heurísticas útiles en el proceso de inspección por humanos, que utilizan la reflexión para analizar los defectos en los objetos especulares bajo cualquier condición del entorno, en el caso de la inspección automatizada mediante técnicas de visión artificial, el control del entorno y del sistema debe simplificar la dificultad de detección. Esta circunstancia sugiere que el primer nivel de aportación de soluciones deberá ser del tipo ¿divide y vencerás¿; separando,en la medida de lo posible, los aspectos visuales del entorno relacionados con la luz. Digamos, en términos coloquiales que el problema a resolver es: encontrar las condiciones del entorno y de calibrado para que las imágenes con distintos motivos puedan distinguirse. Estas condiciones maximizan la probabilidad de detección de los defectos.
En cuanto a los aspectos del entorno se estudiarán las configuraciones --ángulos de iluminación, ángulos de visión, distancias de percepción, etc.- (ver Figura 2. a) que permitan la amplificación de dichos defectos. Centrándonos en los aspectos lumínicos, se plantea un esquema de adecuación de la cromaticidad, polarización y demás características de luz para potenciar y facilitar la percepción de los defectos. La consideración a realizar más importante en el esquema es que con el dispositivo de captación de intensidad lumínica queremos detectar cambios en la frecuencia de luz que denoten un posible defecto. Medir la intensidad de los puntos de la escena mediante un tipo de luz homogénea provocaría un apantallamiento de los defectos en la superficie, como consecuencia de que promediaría el valor de los distintos defectos (ver Figura 2. b).
Para poder medir las frecuencias en lugar de las intensidades vamos a utilizar un esquema en el que el entorno lo vamos a controlar utilizando un patrón de luces con distintas longitudes de onda distribuidas espacialmente como se muestra en la Figura 2. c.
En cuanto a los aspectos de procesamiento del modelo, y una vez amplificada la percepción del objeto mediante las condiciones ambientales, se abren vías de desarrollo donde se debe ubicar el sistema. Como hemos dicho previamente, el objetivo es situarlo en el nivel bajo de visión para poder operar con la máxima rapidez.
La propuesta del sistema es la comparación de imágenes de inspección o características sencillas extraídas de éstas que permitan evaluar las variables del motivo que se desvían sobre la especificación establecida en la fase de diseño. La comparación podrá realizarse sobre imágenes de los motivos sin defectos que estarán almacenadas en bases de conocimiento. Esto nos aporta soluciones generales frente a la utilización de heurísticas relacionadas con las formas, tipo y demás características de los objetos. En el desarrollo del modelo se contemplará en todo momento las características necesarias de los sistemas de inspección visual automática: eficiencia y rapidez.
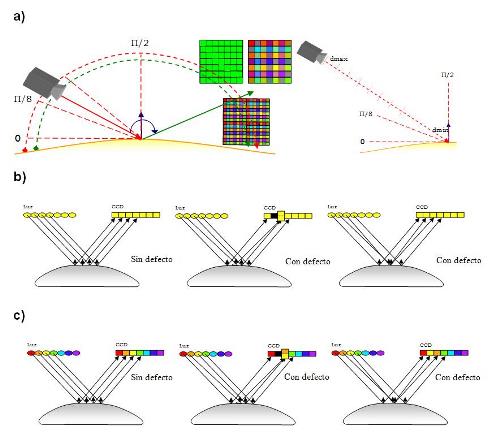
Figura 2. Estudio de parámetros del entorno para amplificar los defectos. a)Configuración de ángulos y distancias de percepción. b) Configuración de luz homogénea. c) Configuración con luces de distinta longitud de onda.
Una vez especificado el modelo, estaremos en disposición de concretar la herramienta de prototipado de sistemas de inspección de superficies especulares. La herramienta debe ser capaz de simular todas las fases del proceso de inspección. Por tanto deberá de proporcionar imágenes realistas a partir de unas condiciones de entorno, motivo y calibrado. Además deberá implementar la inspección definida en el modelo. Una vez simulada deberá extraer una serie de conclusiones en cuanto a escala de percepción de los objetos, ángulos, condiciones de iluminación, etc. que permitirá definir el prototipo en cuestión.
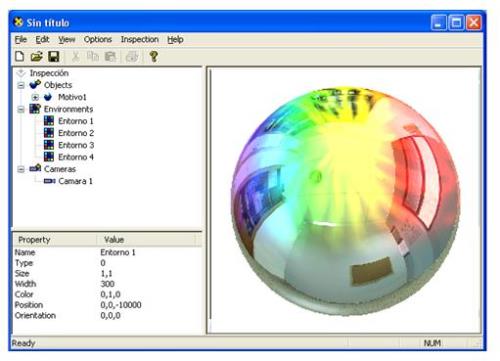
Figura 3. Simulador gráfico para síntesis de imágenes realistas
INNOVACIONES
La herramienta de prototipado de sistemas H-ProSis aunque no es novedosa en lo que se refiere al uso de herramientas para prototipado, si que lo es con respecto a sistemas de inspección visual de superficies especulares. Esta herramienta presenta una novedad tecnológica en cuanto a que permite facilitar el diseño de sistemas de inspección de superficies especulares: estudios de viabilidad o diseño del sistema en su conjunto. Dentro de la herramienta, el modelo que se propone presenta novedades en cuanto a la forma de abordar la inspección mediante la utilización de un esquema general que puede aplicarse en cualquier ámbito sin recurrir a heurísticas del tipo, forma, tamaño defectos etc. Hace uso de bases de conocimiento para todas las partes del proceso.
PRINCIPALES VENTAJAS
Cuando las superficies muestran un predominio de la reflexión especular frente a la difusa, como es el caso de los productos metalizados, vitrificados, plastificados, etc. La discriminación entre reflejos y defectos es compleja incluso para los expertos. En general, la inspección que se desarrolla en las empresas es de una eficiencia irregular y poco segura debido a las distintas capacidades y experiencia de las personas que examinan, así como a la fatiga y la monotonía de este trabajo. Los sistemas de inspección visual automática permiten una supervisión desasistida de los productos que puede repercutir de forma directa en la cadena de valor de estas empresas. Estos sistemas mejoran la productividad y la gestión de calidad y proporcionan una ventaja competitiva a las industrias que emplean esta tecnología. Cuando la inspección a realizar es sobre superficies especulares los inconvenientes de la realización mediante expertos aumentan a la par que el interés de abordarla de forma automatizada.
En particular, el uso de prototipos de sistemas llevaría asociado las siguientes ventajas:
- Reducción sustancial de coste temporal de análisis del sistema y de su desarrollo en la línea de producción.
- Reducción de los costes económicos de material tecnológico necesario gracias a la reducción en la necesidad de caros prototipos físicos.
- Permitiría mantener bases de conocimiento sobre sistemas de inspección en cuanto a su tecnología, sus módulos de procesamiento y en general la arquitectura diseñada que podrá ser utilizada para la realización de sistemas similares en cuanto a las especificaciones de productos de inspección.
- Permitiría reducir los errores derivados de la fase de análisis de sistema, diseño e implementación de sistemas de inspección reales y que pueden detectarse en poco tiempo antes de que se produzcan grandes gastos. Una vez terminado el prototipo virtual del sistema de inspección, las conclusiones pueden usarse directamente para su fabricación física o para poder presentar estudios de viabilidad.
Existe un prototipo de la herramienta que está siendo empleado en el desarrollo de sistemas de inspección de superficies cromadas.
En cuanto a las expectativas de explotación de los resultados se espera inicialmente que se incorpore el producto en la industria alicantina y, en general de la Comunidad Valenciana, donde encontramos sectores tradicionales como el calzado, juguetes, textil, mármol, etc., que necesitan innovación en el proceso productivo para que puedan ser competitivos.
En este sentido, diversas empresas de la provincia alicantina se han puesto en contacto con el grupo de investigación Informática industrial y redes de computadores (i2rc) de la Universidad de Alicante, mostrando interés en el desarrollo de sistemas de inspección visual automática donde intervienen productos con gran capacidad dereflexión especular. Concretamente, el interés está en el desarrollo e implantación desistemas de control de calidad de los objetos de plástico de formas volumétricas cualesquiera, con recubrimiento de cromo, para la confección de apliques, molduras y componentes de la industria del automóvil y para la de grifería.
Acuerdo de proyecto de I+D (cooperación técnica) para finalizar el desarrollo de la tecnología. Asimismo, se desea ofertar la herramienta H-ProSis a los sectores industriales correspondientes.
El equipo investigador de este proyecto pertenece al grupo de investigación Informática Industrial y Redes de Computadores (i2rc) del Departamento de Tecnología Informática y Computación de la Universidad de Alicante. Las líneas de trabajo del grupo integran técnicas de inteligencia artificial, control, visión y redes; habiendo realizado diferentes aportaciones aplicables en contextos industriales (sistemas de visión artificial, control de robots móviles, diseño y fabricación asistida por computador) y en imágenes y modelado de sistemas de origen biomédico (diagnóstico y clasificación).
El equipo está formado por cuatro doctores y tres ingenieros en informática que se encuentran en estos momentos finalizando su tesis en temas relacionados con el tratamiento de imagen y la visión por computador. Los miembros del equipo poseen una amplia experiencia en la dirección y participación en proyectos de investigación de financiación tanto pública como privada.
Los proyectos anteriores y actuales en los cuales los investigadores han participado han sido financiados por entidades públicas como el Ministerio de Educación y Cultura; el Ministerio de Ciencia y Tecnología; o la Consellería de Presidencia y la Consellería de Cultura, Educación y Ciencia de la Generalitat Valenciana. En la actualidad, se encuentran en realización cuatro proyectos: “Visión mediante periférico robótico inteligente para sistemas móviles autónomos” (DPI200204434C0401) financiado por el Ministerio de Ciencia y Tecnología, “Paleontología computacional: gestión de datos y desarrollo de aplicaciones informáticas en paleontología” (GV04B/629), “Modelo de arquitectura especializada para procesamiento de geometría computacional” (GV04A-579) y “Control de calidad de superficies brillantes y especulares mediante visión artificial” financiados por la Consellería de Cultura, Educación y Deporte de la Generalitat Valenciana.
Ingeniería, Robótica y Automática
Juguete
Madera y Mueble
Materiales y Nanotecnología
Piedra y Mármol
Transporte y Automoción




Carretera de Sant Vicent del Raspeig s/n - 03690 Sant Vicent del Raspeig - Alacant
Tel.: 965 90 9959