
Necessites ajuda?
Posa't en contacte amb nosaltres

Necessites ajuda?
Posa't en contacte amb nosaltres
Gràcies per contactar
El teu formulari s'ha enviat correctament. El nostre equip es posarà de nou en contacte amb tu com més prompte millor.
Upppss...!! Ha ocorregut un error.
Intente l'enviament més tard o escriga un correu electrònic directament a areaempresas@ua.es

 TECNOLOGIA PATENTADA
TECNOLOGIA PATENTADA
LA FITXA
COMPLETA
BAIXA
RESUM
EXECUTIU
DADES DE CONTACTE:
Relaciones con la Empresa
Oficina de Transferencia de Resultados de la Investigación-OTRI
Universidad de Alicante
Tel.: +34 96 590 99 59
Email: areaempresas@ua.es
http://innoua.ua.es
El grupo de investigación 'Mobile Vision Research Lab' de la Universidad de Alicante ha desarrollado un nuevo software para la detección de obstáculos aéreos (típicamente toldos y ramas de árboles) dirigido a personas invidentes.
El software utiliza la cámara estéreo de algunos dispositivos móviles para detectar la profundidad de los obstáculos en la dirección en la que camina el usuario. Cuenta con una interfaz accesible, que avisará mediante vibración o sonido de los obstáculos presentes. El aviso se hace más frecuente conforme nos acercamos a los obstáculos. El software está integrado en un Smartphone lo que resulta cómodo y discreto para el usuario.
Se buscan empresas o entidades interesadas en la comercialización y/o adaptación de esta tecnología así como para el desarrollo de proyectos conjuntos de cooperación técnica.

- Introducción
La ceguera es considerada la mayor de las minusvalías sensoriales condicionando en gran medida la vida del individuo, su interacción con el entorno y con la sociedad, su aprendizaje, etc.
Uno de los retos diarios a los que se enfrenta una persona ciega es el del desplazamiento autónomo. En cuanto a la orientación global, existen en el mercado diferentes sistemas basados en GPS con cartografías específicas que mediante interfaces de voz suplen en gran medida este problema. En cuanto a la detección y evitación de obstáculos, son los sistemas clásicos como el bastón o el perro guía los más utilizados.

Figura 1. Sistemas clásicos como el bastón o el perro guía son los actualmente más utilizados por los invidentes para la detección y evitación de obstáculos
Aunque existen desarrollos tecnológicos en este terreno, éstos no han conseguido convertirse en una herramienta cotidiana para esta comunidad. Esto se debe principalmente a que los sistemas clásicos cumplen bastante bien su cometido y los nuevos desarrollos son bastante voluminosos e incómodos, dificultando en gran medida la integración social a los usuarios. Además, en muchas ocasiones se tiende enviar al usuario señales acústicas a través de auriculares, privando al invidente de su principal fuente de información: El sonido.
- Características de la tecnología
El objeto de la aplicación desarrollada por el grupo de investigación del Laboratorio de Investigación en Visión Móvil (MVRLab) de la Universidad de Alicante es que, integrada en un dispositivo o teléfono móvil, actúe como complemento no sustitutivo del bastón o del perro guía resolviendo el principal problema de estos sistemas, esto es, la incapacidad para detectar obstáculos aéreos (Figura 2). Estos obstáculos se caracterizan por no tener proyección contra el suelo (típicamente ramas de árboles, toldos, etc.). En el caso de los bastones la limitación citada es obvia y en el caso de los perros guía no es posible su adiestramiento al no ser conscientes de la diferencia de altura entre ellos mismos y el humano al que guían.
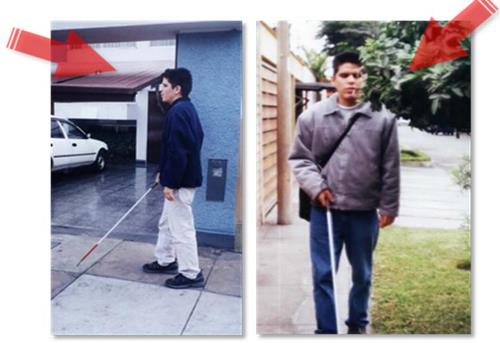
Figura 2. Ejemplos de obstáculos aéreos.
Una ventaja de la presente aplicación es su integración en un teléfono inteligente (Smartphone) por lo que resulta cómodo y discreto para el usuario, facilitando su integración social. Por otro lado, la invención es capaz de avisar de los obstáculos mediante señales acústicas (a través del altavoz del teléfono, no a través de auriculares) o vibraciones, utilizando el sistema de vibración propio del teléfono. Esta última opción hace que el sistema sea aún más discreto, ya que sólo el usuario percibe el aviso y no priva al usuario de la audición, sentido principal para un ciego.
Para la detección de obstáculos, la aplicación es capaz de tomar medidas del entorno a varios metros, siendo necesario para ello que el teléfono inteligente incorpore el hardware que permita obtener la escena en estéreo. Entre estos dispositivos se encuentran los denominados ¿teléfonos 3D¿, dotados con doble cámara frontal, así como cualquier teléfono móvil con una sola cámara que incorpore un sistema catadióptrico que permita obtener dos observaciones del entorno separadas. La aplicación es perfectamente compatible y funcional en ambos tipos de dispositivos.

Figura 3. Modelos de teléfonos dotados con dos cámaras HTC Evo 3D (izquierda) y LG Optimus 3d (centro). Sistema catadióptrico de Fujitsu para obtener dos imágenes separadas con cualquier móvil (derecha).
Además de las dos observaciones, la aplicación utiliza los datos de algunos sensores comunes en este tipo de dispositivos, como es el magnetómetro y el acelerómetro, para detectar la orientación global del dispositivo y estimar con ella la dirección en la que se mueve el usuario.
Cabe destacar que la tecnología que resuelve este problema es tremendamente novedosa dentro del mundo de los teléfonos móviles, ya que hasta el momento no eran capaces de extraer medidas reales del entorno. La aplicación extrae del orden de 30000 medidas por cada frame, a razón de 9 frames por segundo.

Figura 4. La tecnología empleada extrae del orden de 30000 medidas reales del entorno por cada frame, a razón de 9 frames por segundo. Imagen de referencia (arriba izquierda) imagen de profundidad calculada (arriba derecha) y distintas perspectivas de la escena en 3D correspondiente (abajo).
El sistema ha sido desarrollado en la plataforma Android, ya que en otras plataformas, como por ejemplo iOS, no se dispone actualmente de dispositivos 3D, aunque podría ser portado a ellas en el momento en el que se dispusiera del hardware necesario.
- Funcionamiento y manejo de la aplicación
El funcionamiento de la aplicación está relacionado directamente con su portabilidad por parte del usuario, ya que el teléfono debe colgarse del cuello, con la cámara mirando hacia delante y la pantalla del dispositivo apoyada contra el pecho para activar el método de detección de obstáculos. Una vez se detecte mediante el sensor de proximidad del dispositivo que se ha colocado en dicha posición, la pantalla queda bloqueada y comienza la detección de obstáculos. La detección se desactivará girando el dispositivo, o simplemente separándolo del pecho.
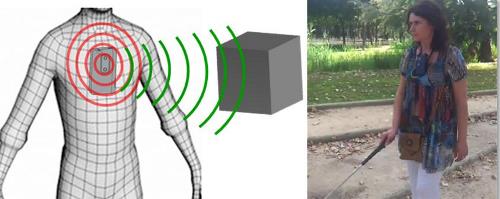
Figura 5: El dispositivo se coloca sobre el pecho, orientando la doble cámara hacia el sentido de la marcha. Cuando se detecta un obstáculo aéreo se avisa al usuario mediante vibración.
La detección de obstáculos se realiza hasta una distancia de cuatro metros en la dirección de avance del usuario, teniendo en cuenta el espacio que ocupa su torso, estimándose un volumen de 0,5 x 0,5 x 4,0 metros. El dispositivo incorpora un algoritmo para corregir el movimiento de basculación producido al caminar, que provoca que la cámara no esté mirando siempre en la dirección real de avance. Con esta corrección, los obstáculos se buscarán en la dirección en la que estamos avanzando, y no hacia donde mira la cámara en cada momento.
Los obstáculos se avisan cuando están a menos de dos metros de distancia en la dirección de avance del usuario. Una vez se detecta un obstáculo, el sistema avisa mediante vibración o pitido, siendo más intensa y/o frecuente según se acerque el usuario al obstáculo.
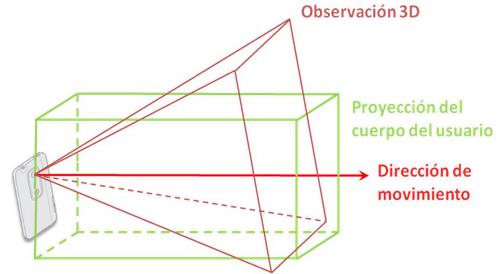
Figura 6. Para poder detectar los obstáculos es necesario conocer la dirección de movimiento del usuario, la cual no es coincidente con la dirección en la que está apuntando la cámara del dispositivo. Para obtener dicha dirección se utilizan los sensores de orientación del móvil.
La aplicación dispone de una interfaz especialmente diseñada para usuarios ciegos. Dicho interfaz tiene por objetivo proporcionar al usuario la posibilidad de configurar distintos aspectos del sistema. El control de interfaz se basa en tres gestos: arrastre vertical para cambiar el ítem del menú, arrastre horizontal para preseleccionar la opción del ítem actual del menú y pulsación para seleccionar la opción actual. Tras cada gesto, y a través del altavoz del dispositivo, se vocaliza el ítem del menú y la opción actual, con el objetivo de que el usuario esté permanentemente informado de las acciones que está realizando.

Figura 7. Aspecto del interfaz de la aplicación.
El interfaz permite configurar distintos aspectos de la aplicación como el modo de trabajo, el tipo de aviso (pitido o vibración), el volumen, la velocidad de la voz, el idioma (la aplicación está disponible en múltiples idiomas), etc.
· Integración en un teléfono inteligente (Smartphone)
· Cómodo y discreto para el usuario, facilitando su integración social.
· Facilidad de uso a través de interfaz táctil especialmente diseñada para invidentes. Vocalización de ítems y opciones.
· Aviso de obstáculos mediante señales acústicas o vibraciones sin privar al usuario del sentido de la audición.
· Permite obtener distancias y medidas de la escena sin necesidad de calibración previa
Existe un prototipo desarrollado sobre los dispositivos 3D actuales: HTC Evo 3D y LG Optimus 3D. Este prototipo está siendo probado por personas invidentes en un ámbito restringido.
· Empresas desarrolladoras de software para dispositivos móviles y smartphones.
· Empresas especializadas en productos de apoyo al invidente.
· Entidades de apoyo a los invidentes (Fundaciones, Asociaciones, Administración pública Nacional y Regional, etc·.)
· Proyectos de I+D en cooperación para desarrollo o adaptación de la tecnología, o para su aplicación a otros sectores.
· Acuerdo de subcontratación para actividades de asesoría, asistencia técnica, desarrollo de software llave en mano, formación, etc. a petición de terceros.
· Acuerdo de licencia del software, know-how y/o de la patente para ceder los derechos de explotación de la tecnología a terceros.
Esta tecnología está protegida mediante solicitud de patente.
Nº de solicitud: 201201247
Fecha de solicitud: 19/12/2012
El grupo de investigación “Mobile Vision Research Lab” de la Universidad de Alicante se centra en las siguientes líneas de trabajo:
• Análisis de Imágenes y datos Biomédicos. Bioinformática.
• Análisis de Video.
• Aplicaciones Multimedia en Móviles.
• Network Science incluyendo el análisis de redes dinámicas de móviles.
• Teorías de la Visión, Reconocimiento de Patrones y Sistemas Complejos: Teoría de la Información, Teoría Espectral y metodologías afines y complementarias.
• Visión Artificial y Reconocimiento de Patrones.
• Visión en Dispositivos Móviles, Embebidos y Autónomos.
Ingeniería, Robótica y Automática
Medicina y Salud




Carretera de Sant Vicent del Raspeig s/n - 03690 Sant Vicent del Raspeig - Alacant
Tel.: 965 90 9959