
¿Necesitas ayuda?
Ponte en contacto con nosotros

¿Necesitas ayuda?
Ponte en contacto con nosotros
Gracias por contactar
Tu formulario se ha enviado correctamente. Nuestro equipo se pondrá de nuevo en contacto contigo con la mayor brevedad posible.
¡¡ Upppss... !! ha ocurrido un error
Intente el envío más tarde o escriba un correo electrónico directamente a areaempresas@ua.es

FICHA
COMPLETA
DESCARGAR
RESUMEN
EJECUTIVO
DATOS DE CONTACTO:
Relaciones con la Empresa
Oficina de Transferencia de Resultados de la Investigación-OTRI
Universidad de Alicante
Tel.: +34 96 590 99 59
Email: areaempresas@ua.es
http://innoua.ua.es
El grupo tiene interés no sólo en el control del robot sino también en la manipulación de los objetos presentes en el área de trabajo. El grupo está interesado en establecer proyectos de I+D con empresas que necesiten adaptar este conocimiento a sus necesidades específicas.
El grupo de Automática, Robótica y Visión Artificial del Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal de la Universidad de Alicante dispone de know-how en telemanipulación de robots a través de Internet mediante entornos virtuales y realimentación multisensorial.
El grupo ha desarrollado nuevos algoritmos, herramientas y tecnologías para la teleoperación remota de brazos robot a través de redes de datos, y principalmente de Internet. El objetivo es ampliar el concepto de teleoperación al de telemanipulación, lo que hace referencia a que el usuario no sólo controle un robot, sino que también manipule con él los objetos presentes en el área de trabajo.
En este sentido, el grupo trabaja en distintas áreas interrelacionadas:
- Robótica industrial
- Control automático
- Visión por computador
- Reconocimiento y modelado de objetos 3D
- Técnicas avanzadas de sensorización
- Protocolos de transmisión de datos
- Internet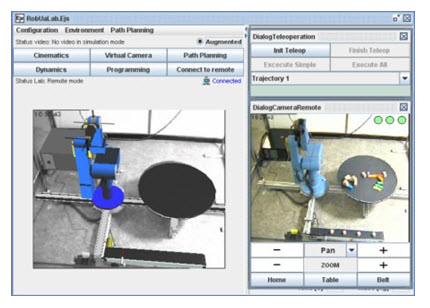
Los aspectos de interés en los que trabaja el grupo son los siguientes:
-Realimentación: Frente a la teleoperación más clásica mediante una realimentación de vídeo, se desea ofrecer al usuario una realimentación basada en una simulación o representación virtual. Aunque la primera opción ofrece al usuario una visión real del trabajo que realiza, presenta el inconveniente de que requiere un canal de transmisión con un mínimo ancho de banda garantizado.
-Simulación: se puede reducir considerablemente la información a transmitir, y así es posible utilizar redes de datos como Internet. Para posibilitar la telemanipulación, la simulación no sólo modela los brazos robot, otros posibles manipuladores y el área de trabajo, sino también los objetos que se manipulan.
-Protocolos de transmisión: para mejorar el rendimiento de la teleoperación, y que a la vez sean aplicables fácilmente sobre equipos y redes de datos estándar.
-Mejora de la interfaz de usuario: Con ello se pretende que al usuario no sólo se le retorne información visual sobre el área de trabajo, sino también de audio y de esfuerzo para que se sienta más inmerso en el área de trabajo. La interfaz de usuario está basada en un equipamiento de bajo coste, siendo factible disponer de muchos terminales de usuario.
VENTAJAS
· La realimentación mediante simulación requiere un ancho de banda menor para el sistema.
· Equipamiento económico para la interfaz de usuario que permite reducir el coste.
ASPECTOS INNOVADORES
· Añadir el concepto de telemanipulación al ya tradicional de teleoperación de modo que el usuario no sólo controle un robot, sino que también manipule con el los objetos presentes en el área de trabajo.
· Realimentación basada en simulación o representación virtual en lugar de la realimentación clásica mediante vídeo.
La tecnología es aplicable a los siguientes casos:
· Sector: Cualquier industria que necesite telemanipulación.
·En general, todos aquellas aplicaciones que necesiten evitar el contacto entre el trabajador y los productos bajo proceso




Carretera San Vicente del Raspeig s/n - 03690 San Vicente del Raspeig - Alicante
Tfno: 965 90 9959