
¿Necesitas ayuda?
Ponte en contacto con nosotros

¿Necesitas ayuda?
Ponte en contacto con nosotros
Gracias por contactar
Tu formulario se ha enviado correctamente. Nuestro equipo se pondrá de nuevo en contacto contigo con la mayor brevedad posible.
¡¡ Upppss... !! ha ocurrido un error
Intente el envío más tarde o escriba un correo electrónico directamente a areaempresas@ua.es

FICHA
COMPLETA
DESCARGAR
RESUMEN
EJECUTIVO
DATOS DE CONTACTO:
Relaciones con la Empresa
Oficina de Transferencia de Resultados de la Investigación-OTRI
Universidad de Alicante
Tel.: +34 96 590 99 59
Email: areaempresas@ua.es
http://innoua.ua.es
El grupo de Visión robótica del Departamento de Ciencia de la Computación e Inteligencia Artificial de la Universidad de Alicante tiene know-how en algoritmos de visión y comportamientos robóticos.
Actualmente, el grupo aplica este know-how en aplicaciones de biometría, vigilancia y reconstrucción de entornos (especialmente para ciegos).
El grupo busca empresas, universidades o centros de investigación interesados en utilizar las herramientas de que disponen, o bien, en aplicar su know-how a proyectos específicos.
El grupo de Visión robótica del Departamento de Ciencia de la Computación e Inteligencia Artificial de la Universidad de Alicante dispone de know-how en algoritmos de visión y comportamientos robóticos, capaz de ser aplicado para el desarrollo de sistemas avanzados de biometría, vigilancia y reconstrucción del entorno 3D.
LÍNEAS DE INVESTIGACIÓN BÁSICA
El grupo trabaja en la implementación de algoritmos de visión artificial efectivos y eficientes para:
- Extracción de características y agrupamientos (obtener una estructura geométrica a partir de grupos de uniones de bordes que estén en contacto).
- Agrupaciones y segmentación (selección automática de los conjuntos de filtros más efectivos para la segmentación de texturas).
- Reconocimiento (tanto explotando el aspecto visual, como las aproximaciones PCA e ICA, la información 3D con estrategias de combinación o la información de forma a través de plantillas deformables).
- Estimación estéreo y de movimientos (algoritmos densos para estimación de disparidad, registro de movimientos y seguimiento).
Del mismo modo, el grupo explota sus conocimientos en visión robótica para realizar tareas de asistencia y guiado en robots móviles. Los principales aspectos sobre los que se trabaja son:
- La orientación relativa del robot, computada a través del análisis de estructuras geométricas.
- La detección de obstáculos y el evitarlos, mediante información 3D estimada con visión estéreo.
- La construcción de mapas 3D mediante visión estéreo y muestreo por algoritmos de partículas-filtros para localizar al robot en el entorno. La efectividad de tal aproximación se incrementa significativamente con la ayuda de la actuación visual que contribuye a identificar partes. El grupo estudia la estimación de estas partes, su incorporación en mapas topológicos y tratar de inferir omportamientos de exploración óptimos a través de aprendizaje por refuerzo.
- El control de arquitecturas y planificaciones que contribuye a colocar con éxito módulos de visión en arquitecturas robóticas.
APLICACIONES
Actualmente el grupo está aplicando su know-how al desarrollo de los siguientes sistemas:
1. Biometría aplicada a la estimación a distancia de medidas de objetos. Mediante la utilización de cámaras estéreo básicas y la proyección de texturas sobre el objeto a medir, es posible obtener soluciones muy económicas para determinar magnitudes como distancias, superficies, volúmenes, etc. Esta tecnología puede ser aplicable a distintos sectores, como por ejemplo el textil, para estimar la talla de una persona.

2. Vigilancia y seguridad en entornos domésticos. A través de la inclusión de cámaras en videoporteros, la utilización de cámaras que realizan el seguimiento de la persona, el envío de imágenes captadas a móvil, etc. Es posible mejorar las prestaciones de los sistemas de vigilancia.
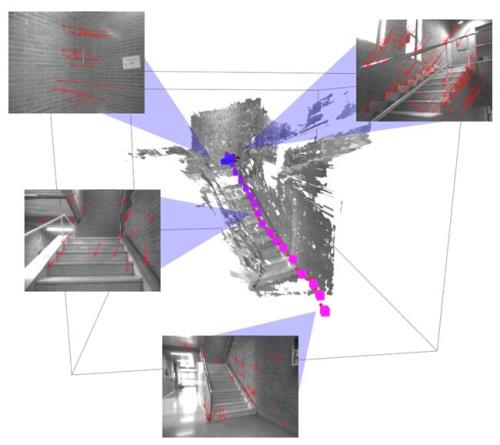
3. Reconstrucción de entornos 3D de edificios para personas ciegas. A través de cámaras localizadas en la persona, es posible realizar un mapeado 3D y reconstruir las áreas de un edificio por donde la persona va pasando.
En función del mapeado del entorno, el sistema envía información a la persona sobre su localización exacta. Esto es especialmente interesante para el guiado de personas ciegas.
4. Juguetes robóticos. Actualmente el grupo de investigación participa, junto con otras universidades españolas, en la competición más importante a nivel internacional en cuanto a competición de robots: la Robocup. En este ámbito, se han desarrollado diversas técnicas de coordinación entre robots y programación de sistemas con recursos limitados.
Estas técnicas pueden ser fácilmente llevadas a juguetes comerciales para aumentar la seguridad o la interactividad de los juguetes con sus usuarios. El equipo de robots futbolistas (ver foto) también nos permite realizar jornadas de divulgación científica

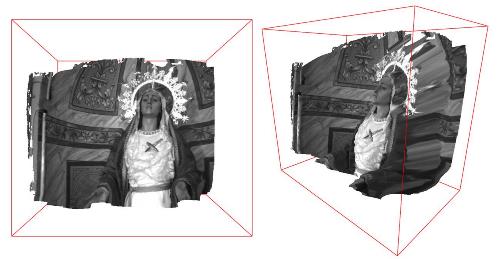
5. Digitalización del patrimonio cultural. La digitalización de fondos culturales o arqueológicos mediante la utilización combinada de sensores 3D, bien basados en visión estéreo o en scan laser, es otro campo de aplicación de nuestro grupo. Se trata de obtener in situ, mediante estos sensores, un modelo digital de la escultura u objeto. Posteriormente, el modelo es depurado, dando lugar a una representación final sobre la que se pueden tomar medidas o que se puede simplificar para facilitar su accesibilidad vía web (museos digitales).
ASPECTOS INNOVADORES
Las aplicaciones avanzadas que se están desarrollando actualmente de biometría, vigilancia y reconstrucción del entorno 3D no están disponibles a nivel comercial.
VENTAJAS
Las principales ventajas de las aplicaciones que se están desarrollando son las siguientes:
- Medición a distancia de magnitudes en objetos.
- Mejora de las prestaciones de los sistemas de vigilancia en entornos domésticos
- Ayuda al guiado y localización de personas ciegas en entornos
La tecnología está desarrollada a nivel de laboratorio. Existen prototipos de los sistemas que han sido probados con éxito y se encuentran disponibles para su demostración
El know-how puede utilizarse al desarrollo de aplicaciones para diferentes sectores como:
- Mediciones de modelos y patrones textiles.
- Entornos de vigilancia.
- Localización de personas ciegas.
- Tipo de cliente buscado: industrias, universidades y centros tecnológicos.
- Sectores. Cualquiera que necesite aplicaciones en robótica y visión artificial: textil, vigilancia, realidad virtual, software, etc.
- El grupo de investigación está interesado en la aplicación de su know-how en proyectos específicos.
La tecnología está protegida por know-how. El grupo de investigación ha publicado diversos artículos científicos que dan muestra de los principales resultados obtenidos.
Juguete
Medicina y Salud




Carretera San Vicente del Raspeig s/n - 03690 San Vicente del Raspeig - Alicante
Tfno: 965 90 9959