
Can we help you?
Contact us

Can we help you?
Contact us
Thank you for contacting us
Your form has been submitted successfully Our team will contact you again as soon as possible.
Whooppss...!! An error has occurred
Try sending later or write an email directly to areaempresas@ua.es

INFO
SHEET
DOWNLOAD
EXECUTIVE
ABSTRACT
CONTACT DETAILS:
Relaciones con la Empresa
Oficina de Transferencia de Resultados de la Investigación-OTRI
Universidad de Alicante
Tel.: +34 96 590 99 59
Email: areaempresas@ua.es
http://innoua.ua.es
El grupo de Automática, Robótica y Visión Artificial del Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal de la Universidad de Alicante dispone de know-how para el desarrollo de sistemas de desensamblado automático de componentes.
Estos sistemas, compuestos fundamentalmente por un conjunto de robots trabajando de forma cooperativa apoyados por un sistema de visión artificial y un planificador de trayectorias, permiten separar los distintos elementos que forman un producto de cara a su reciclado.
El grupo está interesado en establecer proyectos de I+D con empresas que necesiten adaptar este conocimiento a sus necesidades específicas.
El grupo de Automática, Robótica y Visión Artificial del Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal de la Universidad de Alicante dispone de know-how para el desarrollo de sistemas de desensamblado automático de componentes.
A partir de este know-how, el grupo de investigación ha puesto a punto una tecnología para el desensamblado automático de componentes que puede adaptar a las necesidades del cliente. La tecnología consiste en un sistema formado por los siguientes elementos:
- Una célula de desensamblado automático compuesta de varios brazos robots industriales (normalmente 2) trabajando de forma cooperativa. Estos brazos robots actúan sobre el sistema que contiene los diversos componentes a desensamblar para poder abordar muchas tareas al mismo tiempo.
- Un sistema multi-sensorial de visión artificial para identificar los elementos del entorno, es decir, los diferentes componentes a desensamblar.
- Una base de conocimiento que almacena la información básica de los componentes a desensamblar.
- Un módulo software de generación de trayectorias (planificadores). Este módulo se basa en morfología matemática en 3D y realiza la planificación de movimientos, es decir el análisis y determinación de las trayectorias óptimas que han de seguir los brazos robots.
- Un módulo de supervisión automático para comprobar si el proceso se lleva a cabo correctamente, según las directivas proporcionadas por los módulos de planificación de movimientos, o si se efectúa según los parámetros previstos el desmontaje de cada uno de los componentes. Este sistema es necesario ya que el entorno puede cambiar constantemente.
FUNCIONAMIENTO
En la figura 1 se presenta un esquema del funcionamiento de la tecnología. Al desensamblador llegará un producto determinado, que tendrá unas características específicas dependiendo en primer lugar del tipo de producto que sea y en segundo lugar del uso que se le haya dado (por ejemplo, a un coche que deba ser desmontado puede faltarle alguna pieza, haberse deformado algunas otras, etc…). El planificador global recibe la orden de desensamblado total o parcial, en cuyo caso ha de especificarse qué componentes del producto se tienen que desensamblar.
Una vez identificado el producto en la base de conocimiento hay que generar un modelado del mismo. Este modelo se obtiene gracias a la información que aporta el sistema de visión artificial y que permite obtener el estado actual del producto, ya que éste puede haber variado considerablemente con respecto a lo que hay almacenado en la base de conocimiento.
Con el modelo real del producto, el planificador de secuencia se encarga de seleccionar de forma automática los componentes que hay que desmontar para poder desensamblar uno dado, y establecer el orden en que se tiene que proceder a separar cada uno de ellos, todo ello sin que se efectúen más operaciones de las necesarias.
La función del módulo generador de movimientos es la de determinar los movimientos que el robot tiene que realizar para desmontar un componente concreto, considerando como restricciones el resto del montaje y la cinemática del robot a emplear.
Una vez generada la sucesión de movimientos, previo al desensamblado automático real por medio de un sistema robotizado, se dispone de un módulo de simulación que permite visualizar el proceso de desensamblado. El modelo será, pues, específico para cada objeto a desmontar, y dependiendo del objeto concreto se establecerá un modo de actuación u otro.
Por último, se produce una retroalimentación en el sistema para iniciar el desensamblado de un nuevo componente.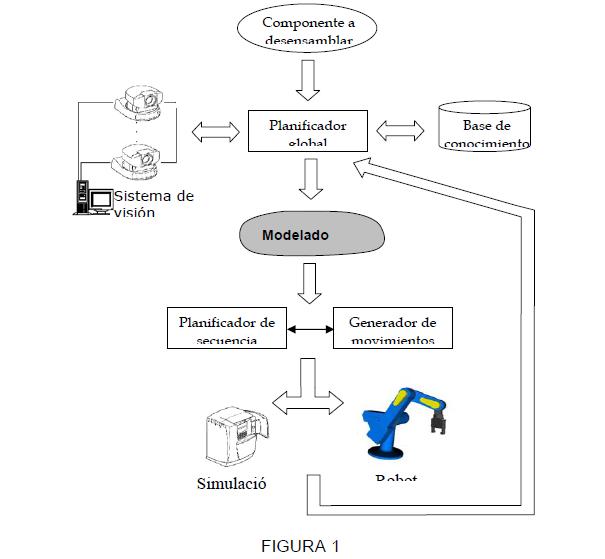
Actualmente existe gran variedad de robots para ensamblado, pero no para desensamblado. Las aplicaciones de desensamblado de componentes no están extendidas a nivel comercial
Las técnicas de desensamblado automático permiten separar los distintos elementos que forman un producto de cara a su reciclado, de forma que se puede considerar el proceso de desensamblado como selectivo, destructivo cuando sea necesario y no destructivo en el resto de situaciones.
El desensamblado automático permite el control on-line del proceso, un mayor grado de flexibilidad y adaptabilidad a los cambios surgidos durante el propio proceso debido a la incertidumbre existente con respecto al producto a desensamblar, al estado de conservación del mismo, al gran número de fabricantes existentes y su gama de productos, etc.
Esta tecnología puede ser aplicada por módulos en función de las necesidades del cliente, esto es, no es necesario utilizar el sistema completo. Esto sería de utilidad, por ejemplo, como sistema de apoyo para la planificación de tareas, inspección visual, instrucción de operarios en los pasos para desensamblado manual, etc.
La tecnología está desarrollada a nivel de laboratorio. Existe un prototipo del sistema que ha sido probado para el desensamblado de componentes de PCs y se encuentra disponible para su demostración.
La tecnología es aplicable a los siguientes casos:
- Desensamblado de piezas en vehículos
- Reciclado de componentes electrónicos (PCs, móviles, electrodomésticos, juguetes con elementos contaminantes como baterías, etc.)
- En general, todos aquellas aplicaciones que necesiten evitar el contacto entre el trabajador y los componentes o que necesiten de su robotización para procesar una gran cantidad de elementos o ayudar a los operarios.
La tecnología es aplicable a sistemas cerrados en los se ha de desensamblar una serie de componentes sistemáticamente y las piezas en origen son sufren variaciones desproporcionadas.
- Tipo de cliente buscado: Industrias,
- Sector: Cualquier industria que necesite desensamblar componentes para el reciclado o desmantelamiento de los componentes fabricados.
- El grupo de investigación está interesado en establecer proyectos de I+D para adaptar su know-how a las necesidades específicas del cliente.




Carretera San Vicente del Raspeig s/n - 03690 San Vicente del Raspeig - Alicante
Tel.: (+34) 965 90 9959